
Six Integrated Technical Projects (ITPs) have been selected from the RobMoSys first open call. These projects will receive funding from the European Union’s Horizon 2020 Research and Innovation Programme
under the RobMoSys project.
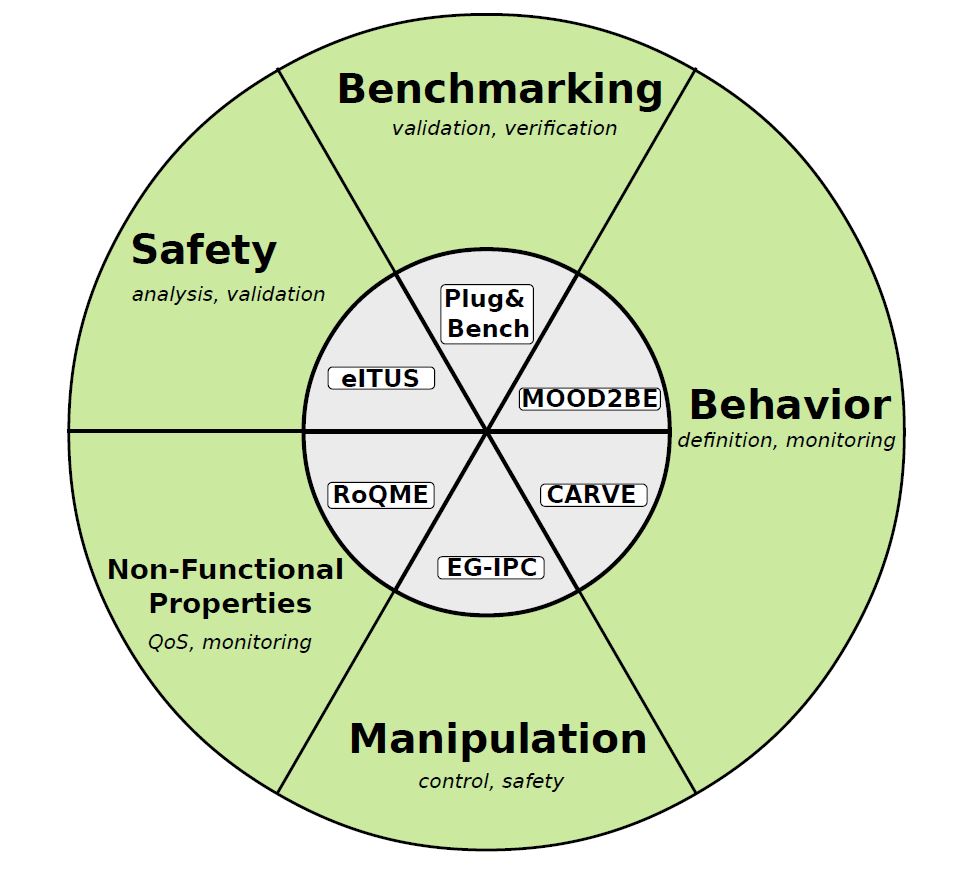
The following projects were selected to realise a step change in system-level composition for robotics, and will demonstrate this in real-world scenarios. The step change will not only be visible in the modelling foundation of the contributions, but also in the industry-grade quality of their realisation. In the medium-term future, companies should be able to rely on the RobMoSys outcomes to build robotic applications by composing high quality composable models and associated software functions.
In our first open call, we asked for projects to illustrate their contribution in the domain of robot-centric motion, navigation and manipulation.
 x
x
For more information on the individual ITPs, click on the tabs below: