

EGCS RobMoSys ITP
Energy-Guided Control Stacks and Robot-Software Architectures using Model-Driven Design
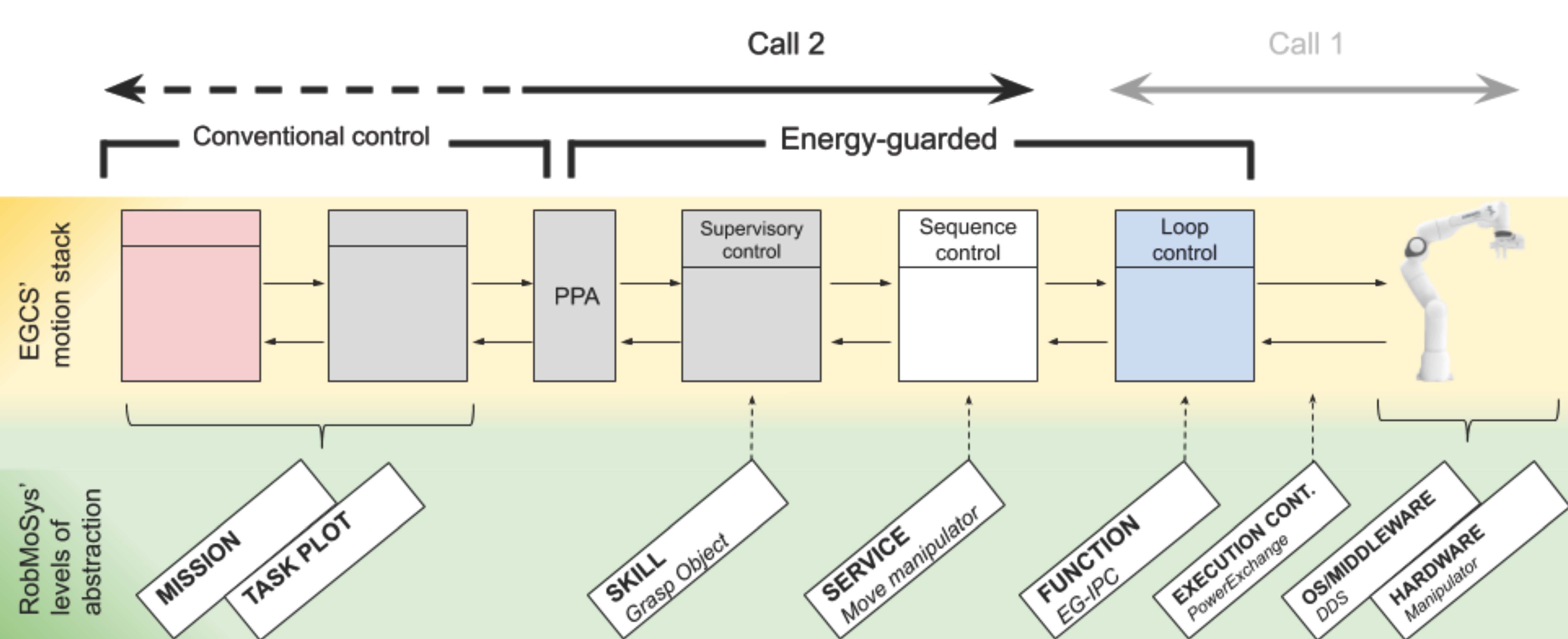
In EGCS, we extend the concept of energy-guarded loop controller components to the whole control stack, so, including sequence controllers and supervisory controllers.In practice this means using the energetic information – which is available through the energy guards that are developed in the “EG-IPC” ITP – of the components as status information on those components, such that higher-level control layers can infer whether the system operates safe and as expected.This contributes to the autonomy and reliability of the system, as it becomes fully aware of the physical interactions with the environment.
EGCS RobMoSys
With this project, we are addressing the challenge of “predictability and management of system-level properties of manipulation applications”. By following the RobMoSys model-driven composition approach, we aim to create models and meta models of a component-based energy-aware motion stack extension that will enable:
- Predictable system-level energetic behaviour providing passivity and thus stability and safety properties of component-based, networked systems.
- Responsive task execution by using information on the energetic state of the system at the skill and service levels, resulting in higher predictability of system performance.
- Information on the energetic state and energy usage of the system can be used to provide the human operator with valuable information on the energy that is consumed in during task execution and how that compares to expected values.
