User Tools
Table of Contents
The SmartSoft World

SmartSoft is an umbrella term for concepts and tools to build robotics systems. The SmartSoft approach defines a systematic component-based robotics software development methodology and according model-driven tools that support different developer roles in a collaborative design and development of robotic software systems. The SmartSoft World includes (a non-complete list):
- The SmartMDSD Toolchain: an Integrated Development Environment (IDE) for robotics software development using model-driven software development.
- The SmartMARS Meta-Model: It defines the structures behind the service-oriented and component-based approach.
- The SmartSoft Framework and implementation: two exchangeable reference implementations (current: ACE middleware, former: CORBA middleware) and execution containers for several platforms and operating systems.
- A repository with open source software components for immediate reuse to compose new applications (sensor access, skills, task sequencing, knowledge representation, etc.). They have been built with the SmartSoft technologies and tools.
There are two main technology clusters in SmartSoft that adhere to the RobMoSys structures. One is the SmartSoft robotics framework that provides a C++ library for programming robotics software components independent of the underlying communication middleware. The other technology is the SmartMDSD Toolchain that directly implements the RobMoSys metamodels and conforms to the RobMoSys structures. It serves as a baseline for model-driven tooling.
SmartSoft is officially supported by FESTO Robotino (see also Robotino Wiki).
See: Getting started with the SmartSoft World
The SmartMDSD Toolchain (version 2.x) and the SmartSoft framework (version 2.x) are very matured (TRL 6) are – among others – used by FESTO Robotino. They will be supported for a while but are not fully conform to RobMoSys.
The SmartMDSD Toolchain (version 3.x) is fully conform to RobMoSys and meanwhile achieved the same maturity level as the version 2.x series (in use within other projects such as BMWi PAiCE SeRoNet and used by FESTO Robotino).
The RobMoSys staff is happy to support you in choosing the right version depending on your needs. (To all RobMoSys Integrated Projects: approach your coaches for help!)
Conformance to RobMoSys Composition Structures
The SmartSoft software baseline is continuously evolving to match the latest developments in robotics software engineering methods. While many current SmartSoft structures already now fully conform to the RobMoSys definitions, there are some necessary refinements that are summarized below.
Further differences between the current SmartMARS Metamodel and the RobMoSys composition structures will be described in the same way here.
Separation of Levels and Concerns in SmartSoft
SmartSoft provides implementations for the individual levels listed in Separation of Levels and Separation of Concerns:
| Level | Available/Accessible in the SmartSoft World |
|---|---|
| Mission | SmartTCL HL Interface |
| Task Plot | SmartTCL Task Block |
| Skill | SmartTCL Skill Block |
| Service | Service Definitions: - Communication Object (data structure) - Communication Patterns (comm. semantics) SmartSoft Components |
| Function | C++ Library (libOpenRave) |
| Execution Container | SmartTask |
| OS/Middleware | ACE, CORBA, DDS, Linux, Windows, iOS |
| Hardware | UR5, Sick, ARM, x86, Robotino, Segway, MARS |
Robotics Behavior in SmartSoft
SmartTCL (and the concept of Dynamic State Charts) are realizations of the Architectural Pattern for Task-Plot Coordination (Robotic Behaviors)
SmartSoft Terminology
To be extended based on needs.
Communication Object
- A self-contained entity to hold and access information that is being exchanged via services between components in SmartSoft.
- Communication objects are ordinary C++-like objects that define the data structure and implement middleware-specific access methods and optional user access methods (getter and setter) for convenient access.
- See also the RobMoSys definition for Communication Objects
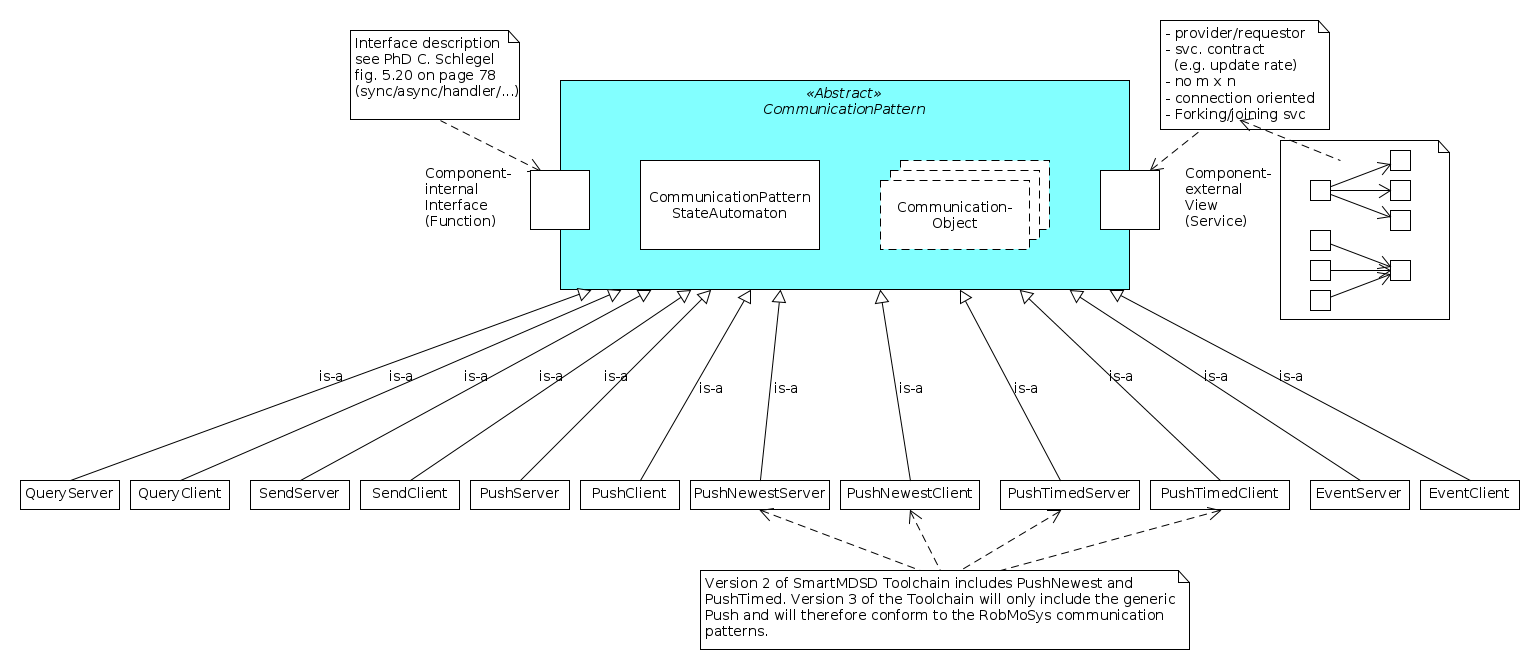
Communication Pattern
Communication Patterns are a set of few but sufficient characteristics for the exchange of information over services for component interaction in SmartSoft. Communication patterns are fix set of software patterns defining recurring communication solutions for robotics software components. SmartSoft provides communication patterns for the sake of composability, for example send, two-way request-response, and publish/subscribe mechanisms on a timely or availability basis. SmartSoft communication patterns are an implementation of the Architectural Pattern for Communication
Framework
Abstracts away platform-specific details such as independence of a particular operating-system (OS) and communication middleware by providing a unified and platform independent API.
Quality of Service
Quality of Service (QoS) defines the ability of a system to meet application-specific customer needs and expectations while remaining economically competitive. (see Wikipedia service-quality)
Further Resources
All about the SmartSoft World can be found at http://www.servicerobotik-ulm.de. Selected links:
- Getting started with SmartSoft provides an overview and starting point
- Use SmartSoft and Gazebo to run the PAL robotics Tiago in simulation
Selected Publications
- Dennis Stampfer. “Contributions to System Composition using a System Design Process driven by Service Definitions for Service Robotics”. Dissertation, Technische Universität München, München, Germany, 2018. Link
- Alex Lotz, “Managing Non-Functional Communication Aspects in the Entire Life-Cycle of a Component-Based Robotic Software System”, Dissertation, Technische Universität München, München, Germany, 2018. Link
- Dennis Stampfer, Alex Lotz, Matthias Lutz, and Christian Schlegel. “The SmartMDSD Toolchain: An Integrated MDSD Workflow and Integrated Development Environment (IDE) for Robotics Software.” In: Journal of Software Engineering for Robotics (JOSER): Special Issue on Domain-Specific Languages and Models in Robotics (DSLRob) 7.1 (2016). ISSN 2035-3928, pp. 3–19. Link
- Alex Lotz, Arne Hamann, Ralph Lange, Christian Heinzemann, Jan Staschulat, Vincent Kesel, Dennis Stampfer, Matthias Lutz, and Christian Schlegel. “Combining Robotics Component-Based Model-Driven Development with a Model-Based Performance Analysis.” In: IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR). San Francisco, CA, USA, Dec. 2016, pp. 170–176. LINK
- Matthias Lutz, Dennis Stampfer, Alex Lotz, and Christian Schlegel. “Service Robot Control Architectures for Flexible and Robust Real-World Task Execution: Best Practices and Patterns.” In: Workshop Roboter-Kontrollarchitekturen, co-located with Informatik 2014. Vol. P-232. GI-Edition: Lecture Notes in Informatics (LNI). ISBN: 978-3-88579-626-8. Stuttgart: Bonner Köllen Verlag, 2014. LINK
See also: Further Publications and Technical Reports in context of SmartSoft.
http://www.robmosys.eu/wiki/baseline:environment_tools:smartsoft:start
Page Tools
