User Tools
baseline:environment_tools:smartsoft:smartmdsd-toolchain:navigation-stack:start
Table of Contents
Support for the Flexible Navigation Stack
This page describes how the SmartMDSD Toolchain and the SmartSoft World supports the Flexible Navigation Stack.
Ready-to-run Example: Tiago
As one of the further baselines in RobMoSys, the SmartSoft navigation components can be used with the PAL Robotics Tiago platform within the Gazebo simulation. It features PAL Robotics Tiago: see SmartGazeboBaseServer as virtual robot base. This example is available “ready-to-go” in the virtual machine image. A screenshot of the SmartMDSD Toolchain displaying the flexible navigation stack:

Available Software Components in the SmartSoft World
The five ready-to-use navigation components of the navigation stack can be downloaded from the SmartSoft Github component repository. The following list of references provides documentation for the fife navigation components:
- SmartCdlServer: this is the main obstacle-avoidance component that uses the Curvature Distance Lookup (CDL)1) approach in its core
- SmartPlannerBreadthFirstSearch: this is geometrical path-planning component using a breadth-first-search algorithm
- SmartMapperGridMap: this component calculates up to date occupancy grid maps
- SmartAmcl: this is a localization component internally using the Adaptive Monte Carlo Localization (AMCL) algorithm.
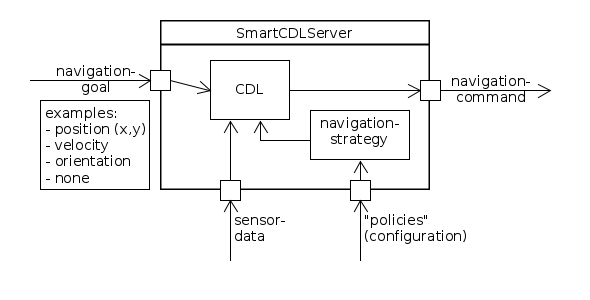
The SmartCdlServer component (see figure below) deserves some further explanations. In a nutshell, this component receives laser-scans and next goals (which can be either a position, velocity, orientation or even undefined). Based on these inputs, the internal CDL algorithm calculates a set of collision-free navigation-commands. Each of these navigation-commands is equally valid, the selection of one “appropriate” one is performed upon a configurable navigation-strategy. For example, one strategy might try to maximize the overall velocity, another might try to stay in the middle of a hallway, yet another strategy might try reaching the next goal closest possible (often the default strategy). This separation between the general obstacle-avoidance and the definition of different strategies adds flexibility with respect to applicability of this component in different scenarios.
There is a list of further components related to different sensor types and robot platforms as alternatives to the above list of components: More precisely, the following two to use robot platforms are supported directly:
- Pioneer P3DX: SmartPioneerBaseServer
The following sensor component provides updated laser-scans using the SICK LMS200 laser scanner:
- SmartLaserLMS200Server: provides lase-scans.
The Flexible Navigation Stack with FESTO Robotino3
Note: all components and links in this section refer to the v2-generation of the SmartMDSD Toolchain:
- SmartRobotionBaseServer: see the Robotino3 Wiki
- A packaged set of several components for immediate use, including those from the navigation stack with the Robotino3 platform can be downloaded from here.
Another application that uses this navigation stack in a structured and coordinated fleet environment using e.g. Robotino3 robots is described in the ETFA2016 paper2).
1)
Christian Schlegel. “Fast local obstacle avoidance under kinematic and dynamic constraints for a mobile robot”. In IEEE International Conference on Intelligent Robots and Systems (IROS). Victoria, Canada, 1998. DOI: 10.1109/IROS.1998.724683.
2)
Matthias Lutz, Christian Verbeek and Christian Schlegel. “Towards a Robot Fleet for Intra-Logistic Tasks: Combining Free Robot Navigation with Multi-Robot Coordination at Bottlenecks”. In Proc. of the 21th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Berlin, September 6-9, 2016. Electronic ISBN: 978-1-5090-1314-2, DOI: 10.1109/ETFA.2016.7733602
baseline:environment_tools:smartsoft:smartmdsd-toolchain:navigation-stack:start · Last modified: 2020/12/04 15:05
http://www.robmosys.eu/wiki/baseline:environment_tools:smartsoft:smartmdsd-toolchain:navigation-stack:start
http://www.robmosys.eu/wiki/baseline:environment_tools:smartsoft:smartmdsd-toolchain:navigation-stack:start
Page Tools

This project has received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement No 732410.