RobMoSys Wiki
This is the RobMoSys Wiki for technical content and structures. For general information of the project or its open calls, please refer to the project website.
Please note: The RobMoSys consortium is continuously updating this wiki to provide early insights. See the changelog. If you came here through a RobMoSys document, please see the jumppage to find referred pages.
RobMoSys will enable the composition of robotics applications with managed, assured, and maintained system-level properties via model-driven techniques. It will establish structures that enable the management of the interfaces between different robotics-related domains, different roles in the ecosystem, and different levels of abstractions. Two documents provide an overview and introduction:
- “Section 1 / Excellence”: excerpt of RobMoSys Grant Agreement, Annex 1 (part B)

- Presentation of the RobMosys project at European Robotics Forum 2017, Edinburgh

Glossary
The glossary contains descriptions of used terms.
Your Role in the RobMoSys Ecosystem

Start reading here to see what your role is in the RobMoSys ecosystem or learn more about Roles in the Ecosystem. Main ecosystem users are:
- Behavior Developer
- Component Supplier
- Function Developer
- Performance Designer
- Safety Engineer
- Service Designer
- System Architect
- System Builder
In addition to the regular RobMoSys ecosystem participants, there are also other roles in the RobMoSys ecosystem like the Model-Driven Engineering tool developers (see RobMoSys Composition Structures) and framework builders (see Software Baseline).
General Principles
RobMoSys manages the interfaces between different roles (robotics expert, domain expert, component supplier, system integrator, installation and deployment, operation) and separates concerns in an efficient and systematic way by making the step change to a set of fully model-driven methods and tools for composition-oriented engineering of robotics systems. The following list of pages provide some fundamental principles in RobMoSys.
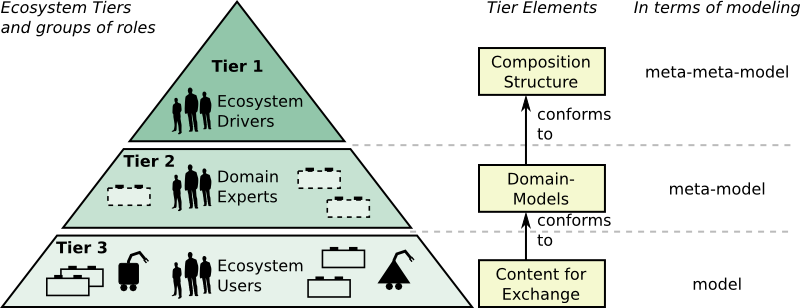
- Ecosystem Organization and Tiers
- PC Analogy: Explaining RobMoSys by the example of the PC domain
Tier 1: Modeling Foundations
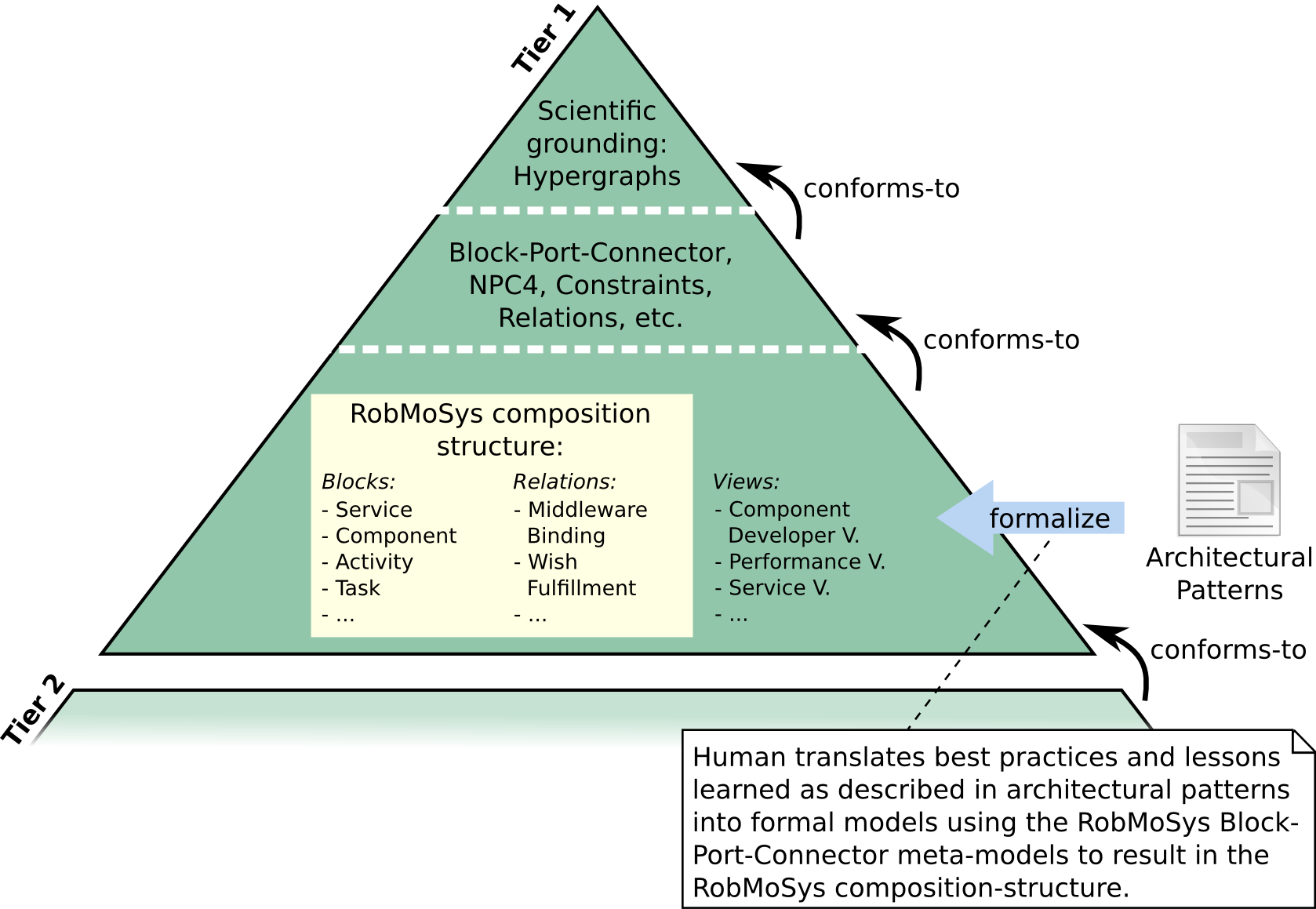
RobMoSys considers Model-Driven Engineering (MDE) as the main technology to realize the so far independent RobMoSys structures and to implement model-driven tooling. The Wiki pages below collect some basic modeling principles related to realizing the RobMoSys structures.
-
-
- Scientific Grounding: Hypergraph and Entity-Relation model
Tier 2: Examples of Domain Models

RobMoSys allows the definition of domain-specific models and structures at composition Tier 2. To illustrate this concept, RobMoSys defines the following extendable content for Tier 2.
- etc.
Tools and Software Baseline

RobMoSys provides a set of tools and a software baseline that already conform to the RobMoSys approach. This set can serve as a starting-point for implementations or demonstrations.
Tooling Baseline
- Development Environments and Tools
- to be extended
Tier 3: Existing Building Blocks and Scenarios
- Components
- Scenarios and Systems
Other Approaches in the RobMoSys Context

RobMoSys follows a reuse-oriented approach. This means that reinvention should be kept to a minimum and existing approaches should be used wherever possible. The following list provides some common approaches that are considered relevant within the RobMoSys context.
- Robotics Approaches (ROS, YARP, RTC, etc.)
- Middlewares (DDS)
http://www.robmosys.eu/wiki-sn-01/start
Page Tools
