Find more information on each ITP of the second call here.
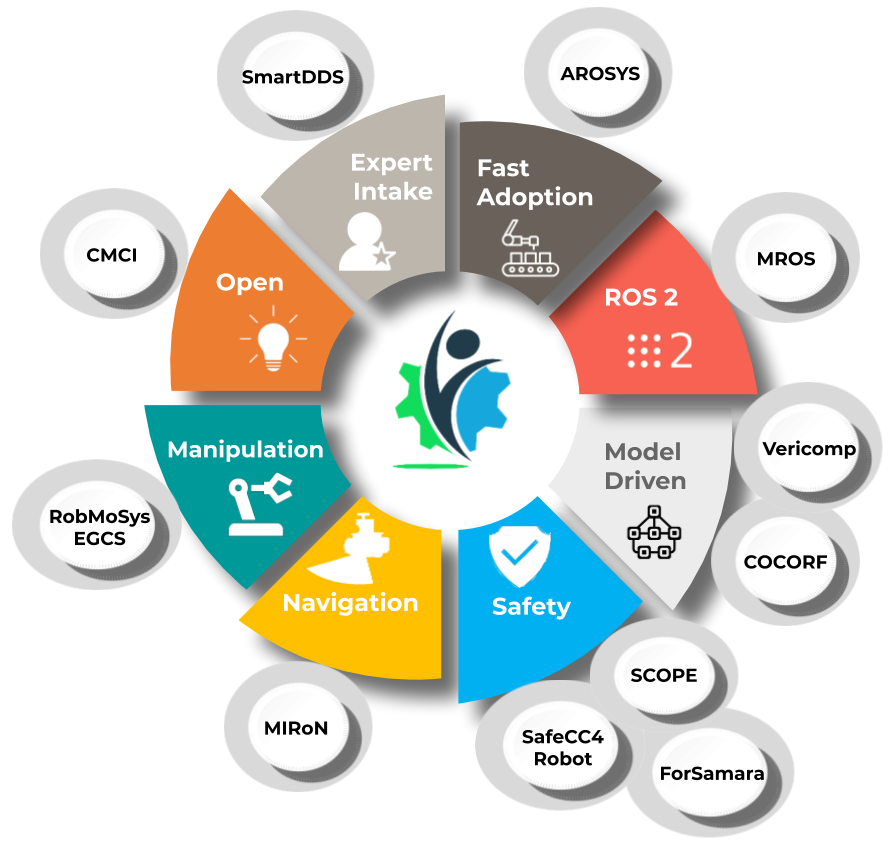
AROSYS - Advanced Robot Simulations for RobMoSys
CMCI - Composable Models for Compliant Interaction Control
COCORF - Component Composition from Real-time Function Blocks
EGCS - Energy-Guided Control Stacks and Robot-Software Architectures using Model-Driven Design
ForSAMARA - Formal Safety Analysis in Modular Robotic Applications
MIRoN - QoS Metrics-In-the-loop for better Robot Navigation
MROS - Metacontrol for ROS2 systems
SafeCC4Robot - Safety Component Composition for Robots
SCOPE - Skill composition with verified system properties
SmartDDS - Guidelines for Improving SmartMDSD with DDS and QoS attributes for communications
VERICOMP - Verifiable Composition of Dynamics and Control Algorithms for Robot Motion
Want to know more?
Read about the six Integrated Technical Projects (ITPs) from the RobMoSys first open call