User Tools
Table of Contents
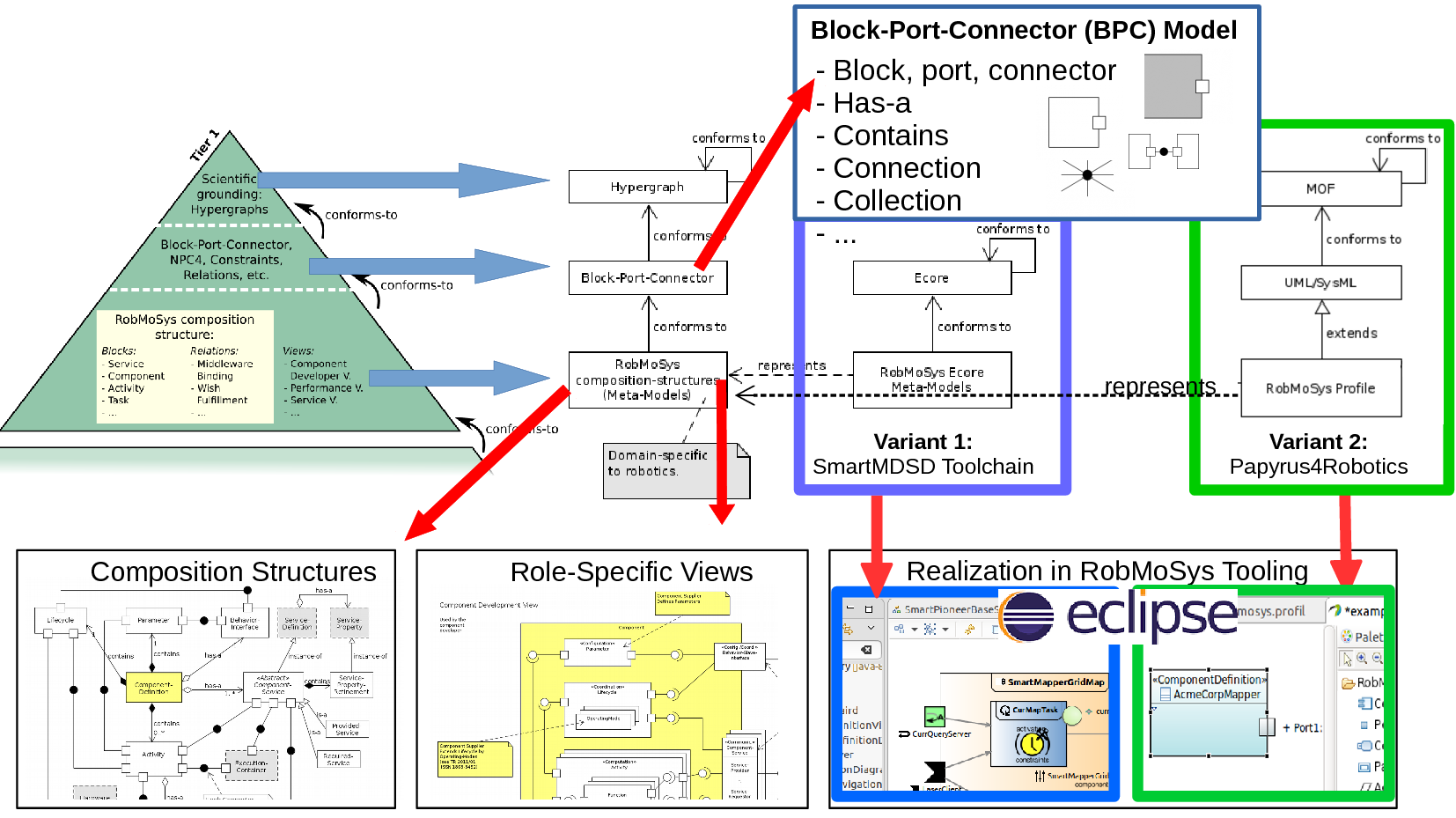
Tier 1 in Detail
Tier 1 provides the general structures for composition. The figure below shows the details of the structure of Tier-1 that refines into three levels. All the elements in Tier-1 are summarized as meta-meta-models. Moreover, the meta-meta-models within Tier-1 are organized themselves in a hierarchical manner in order to best serve the realization of the RobMoSys objectives. The lowest level within Tier 1 contains the RobMoSys composition structures. Tier-2 then conforms to these composition structures.

The levels of Tier 1
Hierarchical Hypergraphs and Entity-Relation Model
Hierarchical Hypergraphs can be considered as the topmost abstraction level within Tier 1. It allows definition of a sound scientific grounding and a formalization in a most flexible model. Any modeling structure can be represented by a Hypergraph. The specific structures on the levels below are always specializations (i.e. refinements) of a Hypergraph.
The Hypergraph and Entity-Relation Model page provides additional details.
Block-Port-Connector
The next level on Tier 1 is the definition of blocks, ports and connectors as a general meta-level that allows definition of any domain-specific meta-model such as e.g. the RobMoSys composition structure (see below).
The Block-Port-Connector page provides a more detailed description.
RobMoSys Composition Structure
RobMoSys composition structures provide domain-specific meta-structures that are used on the lower Tier 2 and Tier 3 to design robotics models in specific robotics subdomains.
The RobMoSys Composition Structures page provides further details.
The RobMoSys views are a complementary technique to the RobMoSys composition structures. This technique supports definition of role-specific modeling views that allow modification and refinement of specific primitives without breaking the overall structures. This is a useful technique that directly supports separation of roles and at the same time allows realization of model-driven tooling that ensures overall system consistency.
The RobMoSys Views page provides further details.
Initial Structures and Evolvement of Tier 1
There are two approaches on how to come up with the composition structures in Tier 1. RobMoSys is a community effort and will guide contributors in one of these approaches such that their knowledge and methodology becomes accessible through the composition structures. For example, the following two approaches have already proven to be successful with respect to the integrated technical projects (ITPs) of RobMoSys.
The first and initial approach to come up with composition structures is to formalize architectural patterns.
The second approach is to evolve the composition structures over time by generalizing existing domain-specific structures. In some cases, the composition structures of Tier 1 may not be sufficient or not complete for modeling in a particular robotics domain. This situation requires additional structures to be added on Tier 2. However, many of these structures tend to be generally applicable or may be generalized such that they become domain-independent and finally part of the composition structures. This is illustrated in the figure below.

The first step (step 1, figure above) is to identify the additional structures that are independent of an application but general to a domain. The second step is to transfer these structures to Tier 1, thereby making them domain independent (step 2, figure above). The final step is to work on the consistency of the newly identified structures with the existing composition structures with the aim to integrate them (step 3, figure above).
For example, it is necessary to shape them to the overall RobMoSys approach, taking separation of roles, composability, etc. into account. This results in the next generation of harmonized composition structures (step 4, figure above).
http://www.robmosys.eu/wiki/modeling:tier1
Page Tools
