User Tools
Deployment Metamodel
The Deployment Metamodel (see figure below) is part of the overall RobMoSys Composition Structures. This meta-model links (i.e. interfaces between) the three meta-models, namely System Component Architecture, Platform and Robotic Behavior.
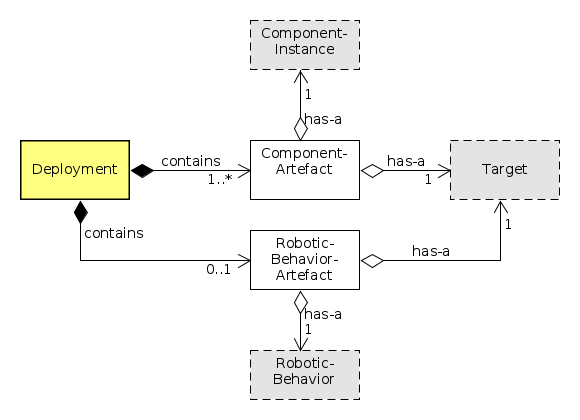
The main concerns of this meta-model are to define artefacts and to assign them to selected targets. This meta-model is inspired by the UML deployment model. There are two artefact types namely component-artefacts and robotic-behavior-artefacts. Component-artefacts represent typically the precompiled binary form of component-instances (including generated ini-files and start scripts). The robotic-behavior-artefact is the physical representation of the robotic-behavior model (often this is an interpretable model).
Depending on the used modeling tool, the deployment meta-model could also be connected with the actual deployment action that copies the component and robotic-behavior artefacts to the according target platforms. However, this is a matter of tooling and is independent of the deployment meta-model as such.
See also:
http://www.robmosys.eu/wiki/modeling:metamodels:deployment
Page Tools
