Note: This is a snapshot of the RobMoSys Wiki as of January 31 2019.
Live Version for this page.
User Tools
modeling:metamodels:component
Component-Definition Metamodel
A Component-Definition Metamodel is one of the core composition structures of RobMoSys.
The Component Metamodel (shown in the figure below) combines two complementary concerns namely structure and interaction. Individual blocks define the main entities of a component (including the component root element itself, highlighted with the yellow background color). For specifying structure, the blocks are connected using either the contains or the has-a relation (as defined in block-port-connector). For specifying interaction, the blocks are additionally connected using dedicated ports, connectors and connections (as also defined in block-port-connector). Moreover, two blocks (highlighted with the gray background color and dashed border-line) represent model elements that are defined in a separate metamodel (described in the next pages).
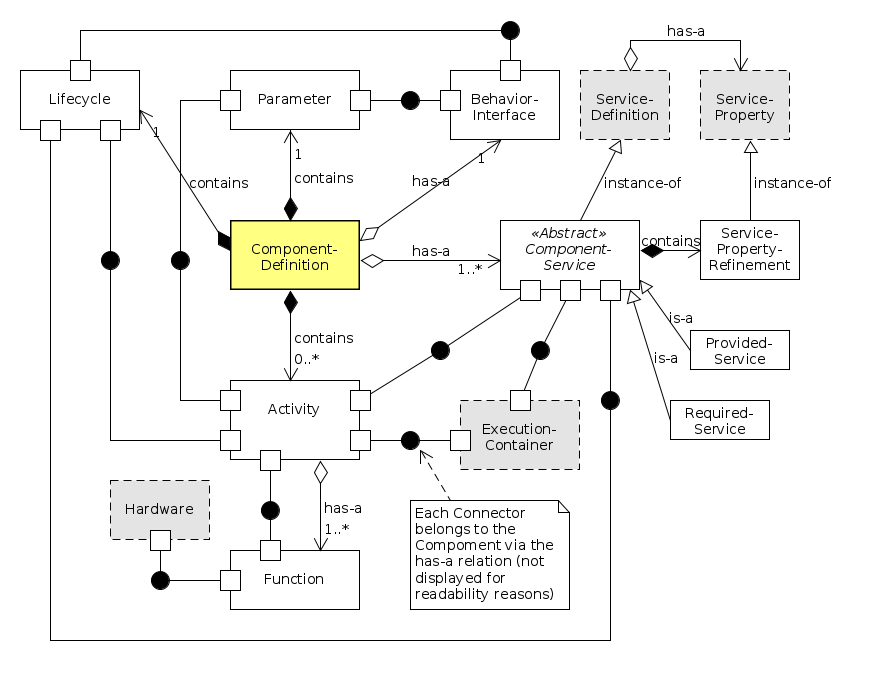
A component contains one Parameter structure, one Lifecycle state automaton and has-a Behavior Interface. The Parameter structure can be a Metamodel (or a DSL) by itself and the Behavior Interface allows run-time coordination and configuration from a higher robotics behavior coordination layer (see JOSER20161) for further details on both elements). The Lifecycle state automaton coordinates the different operational modes of a component. Some generic modes are for example Init, Shutdown and Fatal-Error (see TR20112) for more details).
The next core element of a Component is the Activity which is an abstract representation of a thread. A Component can define several Activities (depending on the component-internal functional needs). An Activity is independent of a certain thread realization and can be later mapped to a certain implementation by the selection of an according target platform. Moreover, an Activity provides a wrapper for the Functions. This is important for gaining control over execution characteristics of a component. This also considerably increases the flexibility (i.e. adjustability) of the component with respect to adapting the component to the different needs of various (at this point even unforeseen) systems.
A Function represents a functional block that can be designed using any preferred engineering methodology. From the component's internal point of view, a Function needs to be integrated into an Activity in order not to prematurely define any computational models that are not really relevant from the local functional point of view but might considerably restrict the compositionality of this component in different systems (see SIMPAR20163) for an example). In some cases, a Function might need to interact with specific hardware devices (such as e.g. sensors or actuators).
The last element of a Component is a Service. A Component can have several required and/or provided Services. A Service is the only allowed interaction point of a component to interact with other (not yet known) components. The definition of a service is described in a separate metamodel. Moreover, a Function interacts with the component's services over the surrounding Activity only. Again, this is important to gain control over execution characteristics as argued above.
See next:
See also:
References
1)
Dennis Stampfer, Alex Lotz, Matthias Lutz, Christian Schlegel. “The SmartMDSD Toolchain: An Integrated MDSD Workflow and Integrated Development Environment (IDE) for Robotics Software”. In Journal of Software Engineering for Robotics (JOSER 2016), Link
2)
Christian Schlegel, Alex Lotz and Andreas Steck, “SmartSoft - The State Management of a Component”, in Technical Report 2011/01, Hochschule Ulm, Germany, ISSN 1868-3452, 2011. PDF
3)
Alex Lotz, Arne Hamann, Ralph Lange, Christian Heinzemann, Jan Staschulat, Vincent Kesel, Dennis Stampfer, Matthias Lutz, and Christian Schlegel. “Combining Robotics Component-Based Model-Driven Development with a Model-Based Performance Analysis”. In IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR 2016). San Francisco, CA, USA, 2016. DOI
modeling:metamodels:component · Last modified: 2019/05/20 10:50
http://www.robmosys.eu/wiki-sn-03/modeling:metamodels:component
http://www.robmosys.eu/wiki-sn-03/modeling:metamodels:component
Page Tools

This project has received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement No 732410.