Cause-Effect-Chain and its Analysis Metamodels
The Cause-Effect-Chain meta-model and the according Analysis Metamodel are two parts of the overall RobMoSys Composition Structures. See also Architectural Pattern for Stepwise Management of Extra-Functional Properties.
The main concern in these meta-models is to specify application-specific (often non-functional) system properties. This is considered as an important aspect in RobMoSys, which is however sparsely addressed in robotics research. One of the core publications that addresses this issue for a narrowed problem domain, namely for designing causal dependencies and overall end-to-end delays in a system, can be found here:
- Alex Lotz, Arne Hamann, Ralph Lange, Christian Heinzemann, Jan Staschulat, Vincent Kesel, Dennis Stampfer, Matthias Lutz, and Christian Schlegel. “Combining Robotics Component-Based Model-Driven Development with a Model-Based Performance Analysis.” In: IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR). San Francisco, CA, USA, Dec. 2016, pp. 170–176. LINK
This publication also provides an initial version of a meta-model that is used as first version in RobMoSys for addressing the overall problem domain.
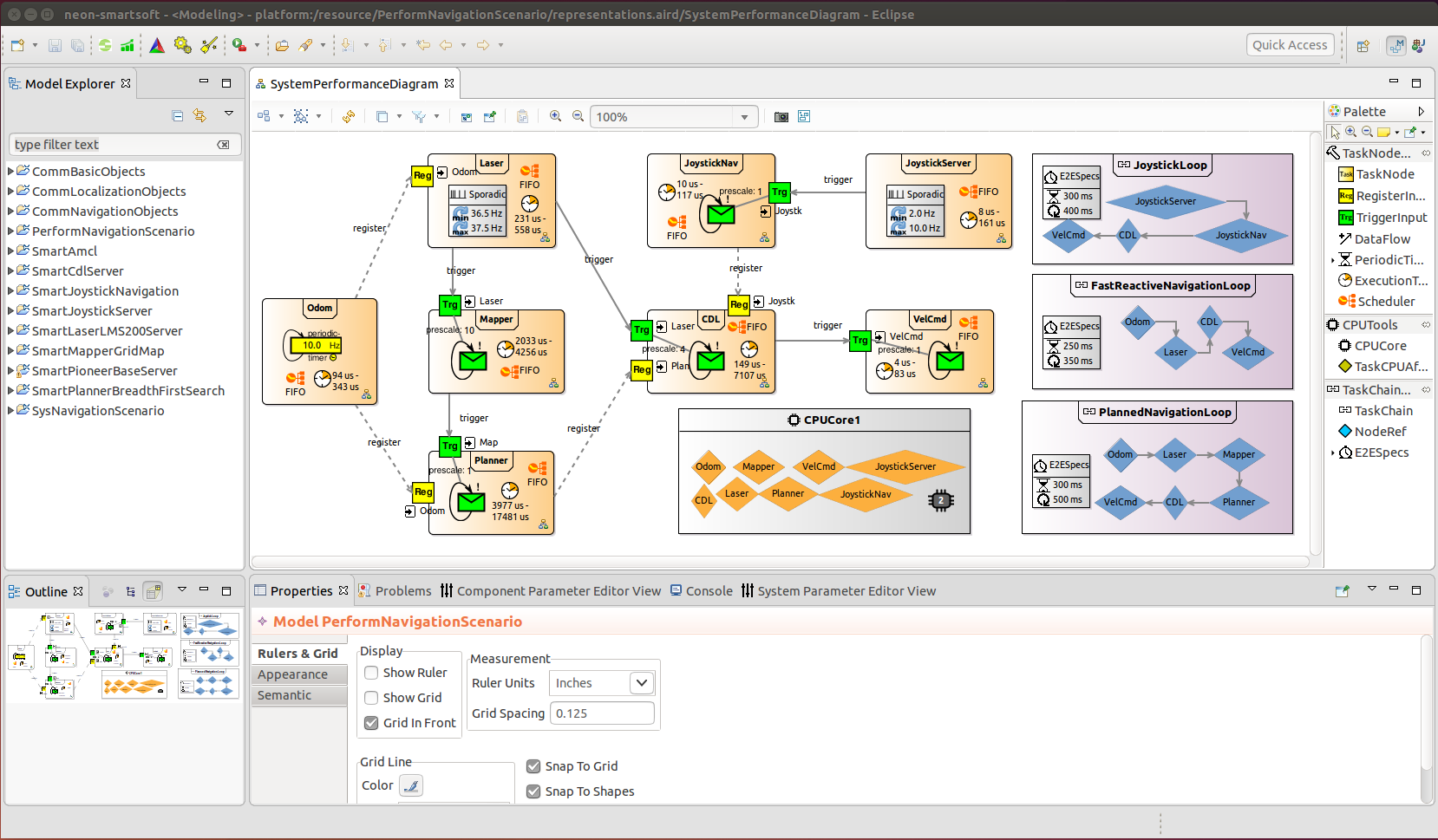
An open-source reference implementation of according model-driven tooling (see above figure) is publicly available within the sourceforge git repository. Further information thereto can be found here.
Later versions of the initial meta-model will be extended throughout the run-time of the RobMoSys project to address a broader problem domain.
Acknowledgement
This document contains material from:
- Stampfer2017 Dennis Stampfer, “Contributions to Composability using a System Design Process driven by Service Definitions for Service Robotics,” 2017. (unpublished work)
- Lotz2017 Alex Lotz, “Managing Non-Functional Communication Aspects in the Entire Life-Cycle of a Component-Based Robotic Software System,” 2017. (unpublished work)
- Lutz2017 Matthias Lutz, “Model-Driven Behavior Development for Service Robotic Systems: Bridging the Gap between Software- and Behavior-Models,” 2017. (unpublished work)
http://www.robmosys.eu/wiki-sn-01/modeling:metamodels:performance
Page Tools
