Hola y bienvenidos a Málaga!
Are you looking forward to the European Robotic Forum at the Costa del Sol, where the sun shines 300 days a year?
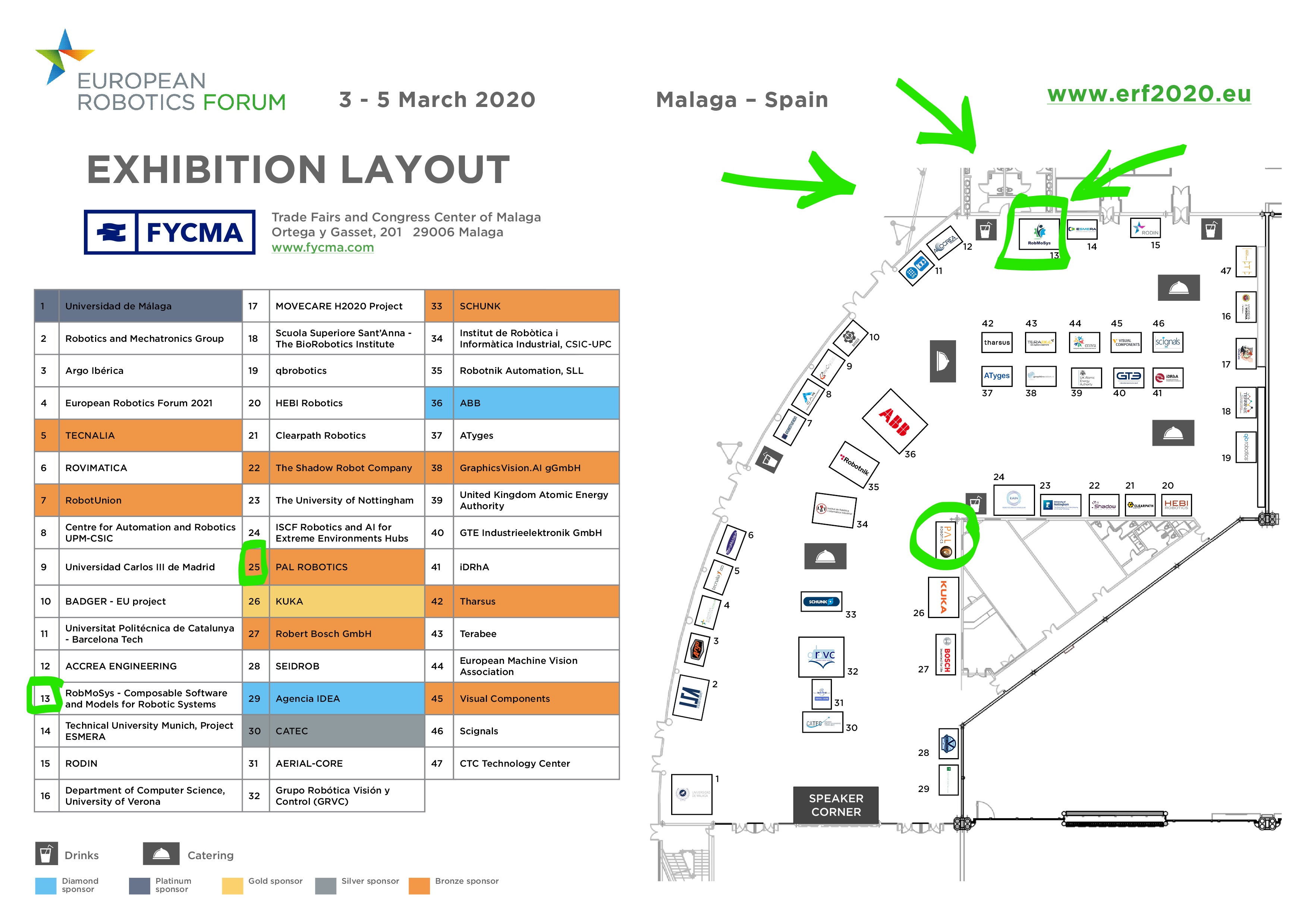
We recommend to wake up early on March 4th, enjoy the sunrise at 7:44 with a strong cup of Spanish coffee and head to our workshop at 8:30 a.m. in the Sala Multiusos 4, where we will talk about "Overcoming the boundaries of today's Robotics Software Engineering":
There are many misconceptions about robotics. The complexity of creating robotic solutions is too high for the domains not using robots today. We want to reduce this complexity. This workshop will give you answers to the most pressing issues: reducing costs and complexity, become more flexible and gain more predictability.
The “EU Digital Industrial Platform for Robotics” – initiative aims to establish a common methodology for software development, improve tools and foster interoperability by model interchange and composability.
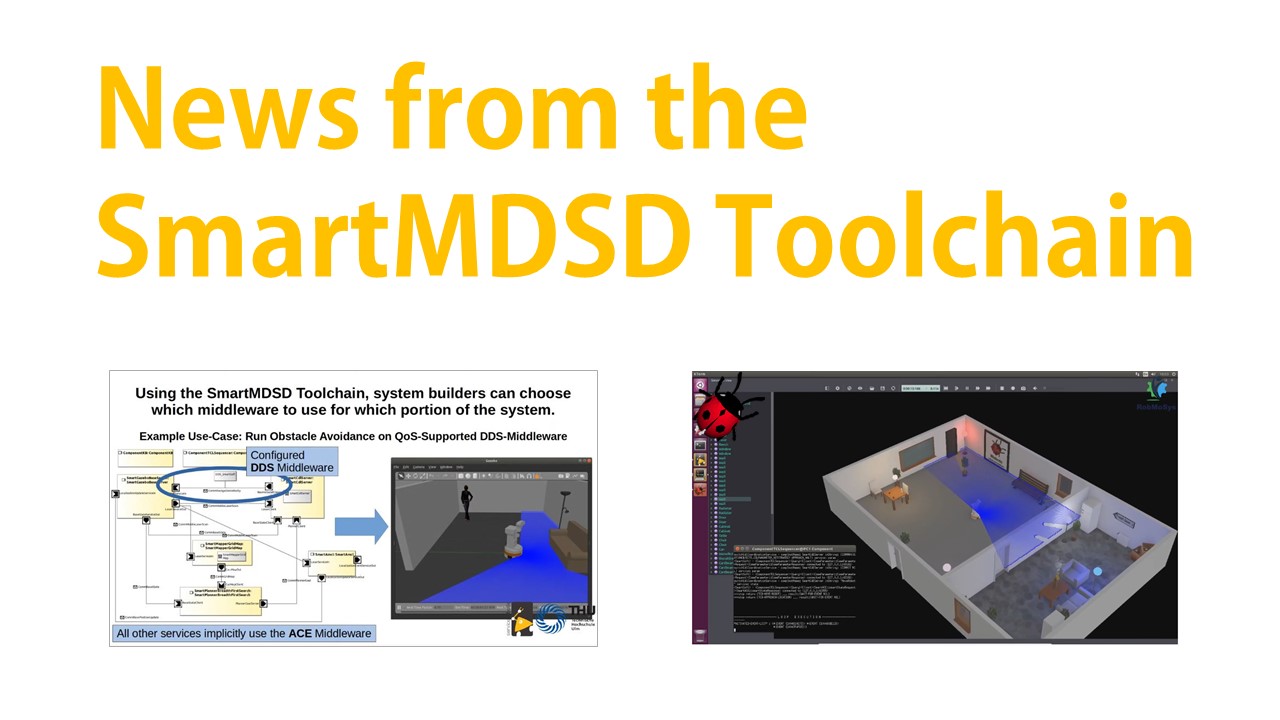
You will see demonstrations of existing tools for the various stakeholders in the development workflow, e.g. Safety Engineers, System Architects, Behaviour Developers, Function Developers, etc…
Find the full agenda here